
Savonia-artikkeli: Autonominen mobiilirobotti 5G-verkossa
#SavoniaAMK
#SavoniaUAS
Nykyään mobiilirobotteja käytetään monilla aloilla, kuten teollisuudessa, varastoissa ja sairaaloissa. Mobiilirobottien on lähetettävä tai käsiteltävä paljon ympäristötietoa reaaliajassa, jotta tarkka ja turvallinen liikkuminen onnistuu.
Varsinkin ympäristöissä, joissa on liikkuvia esteitä, on tärkeää tarkistaa antureiden tuleva ympäristötieto reaaliajassa. Tämän kokoisen tiedon käsittely vaatii monimutkaisia algoritmeja ja suurta käsittelykapasiteettia. Mobiiliroboteissa ei kuitenkaan ole niin tehokkaita prosessoreita useista syistä, kuten energiankulutuksesta.
Ratkaisu käsittelykapasiteettiin on lähettää anturin tiedot reunalaskentapalvelimelle. Reunalaskentapalvelin mahdollistaa datan käsittelyn tehokkaasti, joka mahdollistaa robottien kauko-ohjauksen reaaliajassa.
Perinteiset langattomat tai matkaviestintätekniikat eivät kuitenkaan pysty tarjoamaan riittävää tehokkuutta tekniikan rajoitustensa vuoksi. Nykyään laajalle levinnyt 5G-teknologia tarjoaa meille monia etuja tässä suhteessa.
5G-teknologian edut mobiiliroboteille
Mobiilirobotit tarvitsevat suuren nopeuden ja lyhyen viiveen kriittisiin tehtäviin. WIFI teknologia, erityisesti teollisuusroboteissa, kohtaa ongelmia, kuten rajoitettu kaistanleveys ja sähkömagneettiset häiriöt.
Vaikka 3G- tai 4G LTE-teknologiat ovat ratkaisuja joihinkin WiFi-yhteyden ongelmiin, ne ovat riittämättömiä varsinkin suuren nopeuden ja lyhyen viiveen kannalta.
5G-teknologia tarjoaa nopean ja tietoturvallisen yhteyden teollisuusalueella lyhyemmällä viiveellä. Näin reunalaskentapalvelin voi käsitellä monimutkaisen algoritmin tehokkaasti ja mobiilirobotin tarvitsee vain kerätä tieto ja totella käskyjä. Toteutuksessa etuina on keskitetty robotin ohjaus, pidempi akunkesto ja mahdollistaa yhteystyön robottien välillä.
Mobiilirobotin käyttö 5G-verkossa: Käytännön esimerkki
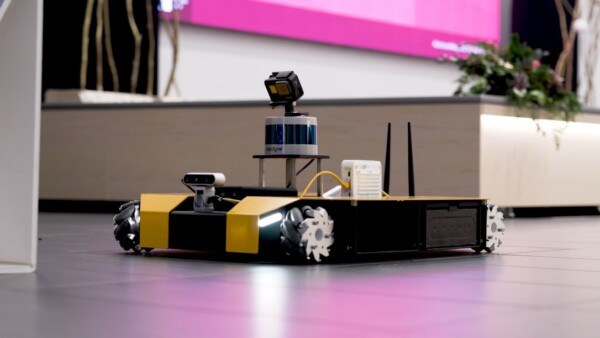
DINGO-O-mobiilirobotti
Tutkimuksessa käytettiin Clearpath Dingo-O -mobiilirobottia. Kevyen painonsa ja kompaktin koon puolesta mobiilirobotti on suunniteltu sisätiloihin. Mecanum-pyörien ansioista se voi liikkua myös sivusuuntaan. mobiilirobotti on varustettu LIDAR-sensorilla ja syvyyskameralla, joten se soveltuu autonomiseen navigointiin. Mobiilirobotin toiminta perustuu avoimen lähdekoodin Robot Operating System (ROS), joka mahdollistaa robotin ohjauksen ja sensoridatan lukemisen. Mobiilirobotti on yhdistetty yksityiseen 5G-verkkoon päätelaitteella, jonka välityksellä se voi kommunikoida reunalaskentapalvelimen kanssa.
Autonominen liike ja esteiden välttäminen
Reunalaskentapalvelimella Python-ohjelmointikielellä kirjoitettu ohjelma mahdollistaa mobiilirobotin liikkumisen itsenäisesti ympäristöissä. Tiedonsiirto Dingon ja reunalaskentapalvelimen välillä perustuu ROS-järjestelmän julkaisija ja tilaaja periaatteeseen.
Mobiilirobotti julkaisee laserskannaus- ja matkamittaustietoja tilaajalle (reunalaskentapalvelin) 5G-verkon yli. Reunalaskentapalvelimella toimiva ohjelma määrittää esteen anturin tietojen avulla ja lähettää takaisin robotille suunnan, kulman ja koordinaattitiedot, joita robotti tarvitsee liikkuakseen.
Tutkimuksessa toteutettiin kolme erilaista skenaariota. Mobiilirobotin tavoitteena on siirtyä lähtöpisteestä kohteeseen ympäristöstä riippumatta.
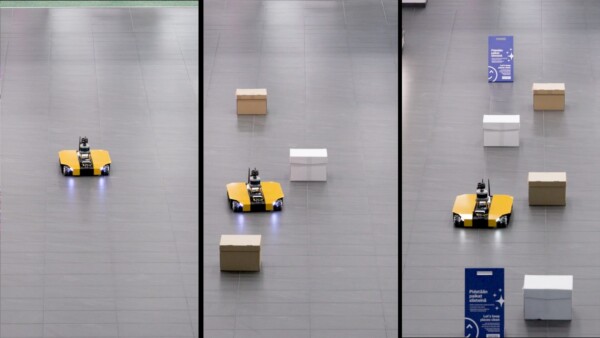
Skenaariot eroavat toisistaan tilaan sijoitettujen esteiden määrällä. Ensimmäisessä skenaariossa tilaan ei ole sijoitettu esteitä. Muissa skenaarioissa tilaan on sijoitettu vähemmän tai enemmän esteitä. Lopputuloksena havaittiin mobiilirobotin saavuttavan määränpää onnistuneesti skenaarioissa ilman, että se olisi osunut tai juuttunut ennalta tuntemattomiin esteisiin.
5G-verkko tarjoaa tarvittavan kapasiteetin mobiilirobotin ohjaukseen
Tutkimuksessa mobiilirobotti käytti reunalaskentapalvelimen resursseja 5G-verkon yli. Mobiilirobotin ympäristön tietojen avulla algoritmi päätteli suunnan, johon robotin pitäisi mennä. Ympäristön tiedot on lähetetty robotille reaaliajassa 5G-verkon kautta.
Robotti ja reunapalvelin kommunikoivat keskenään 5G verkossa, jossa mobiilirobotti saavuttaa tarvittavan liikkuvuuden suurella nopeudella ja erittäin lyhyellä latenssilla. Tulevissa piloteissa tavoitteena on hyödyntää robottien yhteistyötä 5G-teknologian etuja hyödyntäen.
Video:
https://www.youtube.com/watch?v=4HLEwj-Ay4o
Hankkeen tiedot:
5G:llä vauhtia digitalisaatioon (REACT-EU EAKR / Pohjois-Savon liitto, A77467).

Kirjoittajat:
Osman Torunoglu, TKI-asiantuntija, DigiCenter, Savonia-ammattikorkeakoulu, osman.torunoglu@savonia.fi
Timo Lassila, testausinsinööri, DigiCenter, Savonia-ammattikorkeakoulu, timo.lassila@savonia.fi
Aki Happonen, hankevetäjä, DigiCenter, Savonia-ammattikorkeakoulu, aki.happonen@savonia.fi
Ohjelmistokehittäjät:
Mahdi Belila, Savonia-ammattikorkeakoulu, mahdi.belila@savonia.fi
Premton Canamusa, Savonia-ammattikorkeakoulu, premton.canamusa@savonia.fi